Projects I've built to push my ideas into the real world.
A collection of builds, experiments, and prototypes—from simulations to real hardware—that taught me the most.
 Robotics & Automation
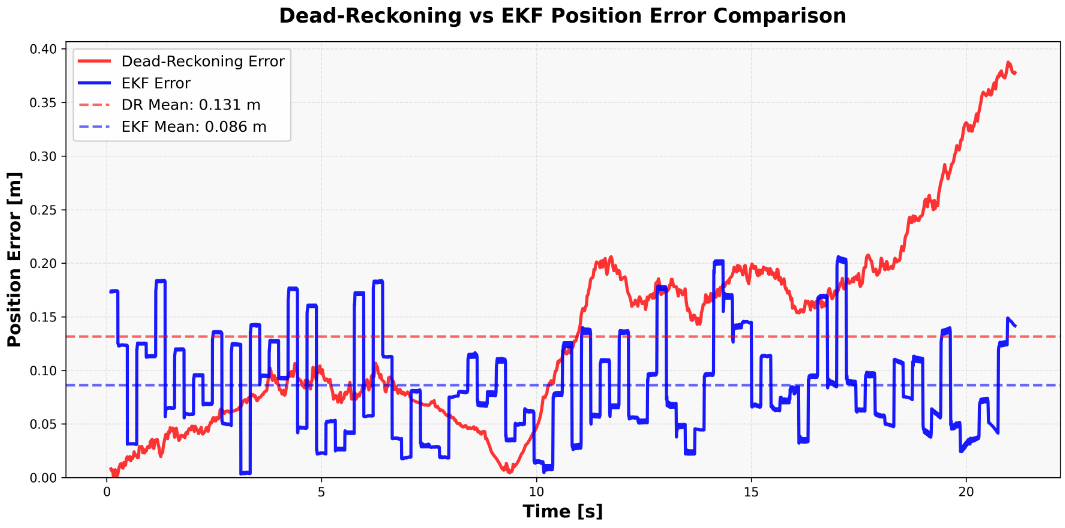
Robotics & AutomationROS2 Extended Kalman Filter for Mobile Robot Localization
Individual Project
A complete ROS2 implementation of an Extended Kalman Filter (EKF) for 2D mobile robot localization through GPS and IMU sensor fusion. This project demonstrates state estimation techniques with real-time visualization and comprehensive performance analysis tools.
Project Details
 Robotics & AutomationAdditive Manufacturing
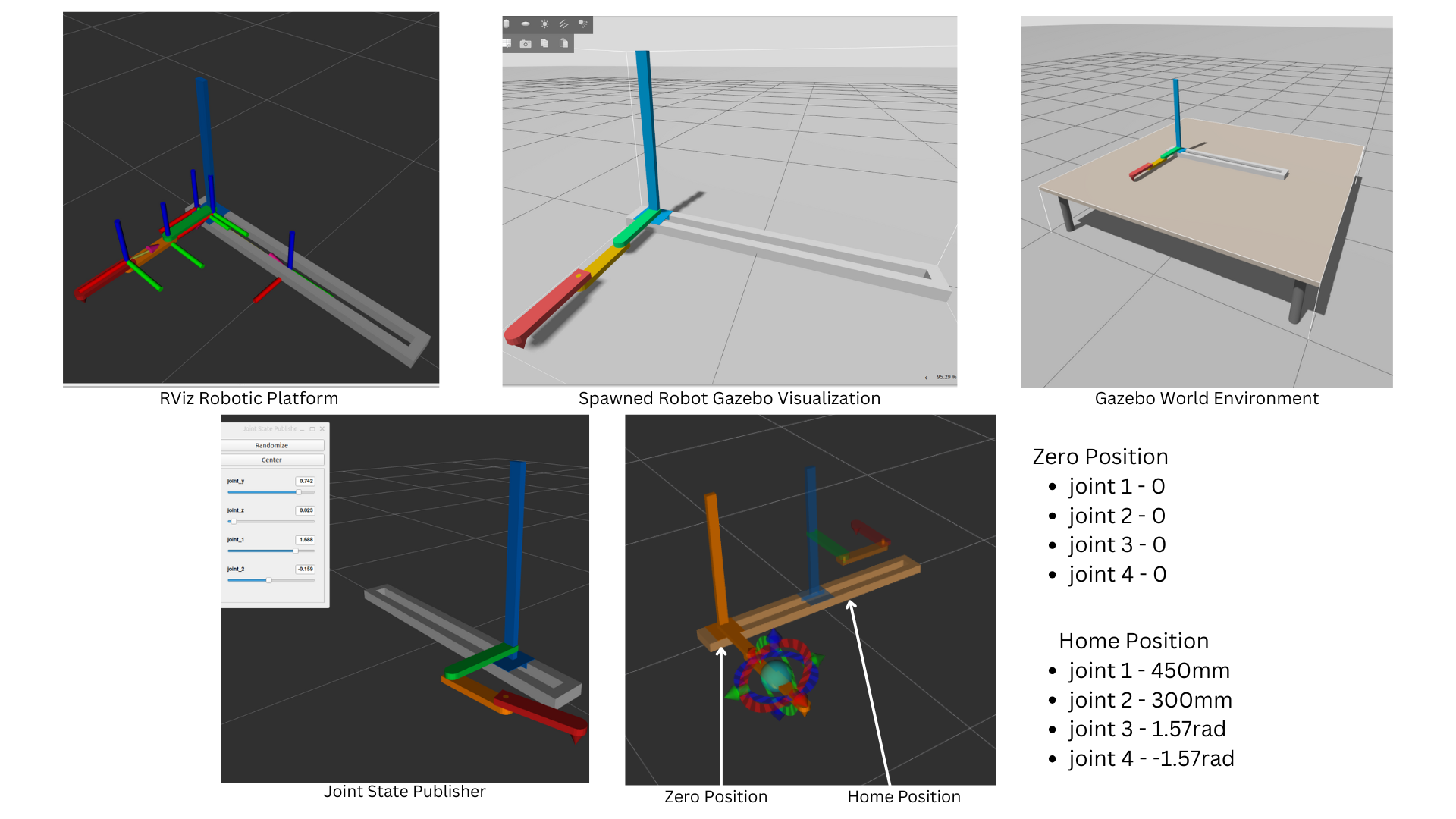
Robotics & AutomationAdditive ManufacturingSCARA Fabrication Station - ROS 2
Individual Project
A complete ROS 2 simulation package for a 4-DOF SCARA (Selective Compliance Assembly Robot Arm) robotic arm based fabrication station with autonomous waypoint trajectory following and real-time path visualization.
Project Details
 Robotics & AutomationAI & Machine Learning
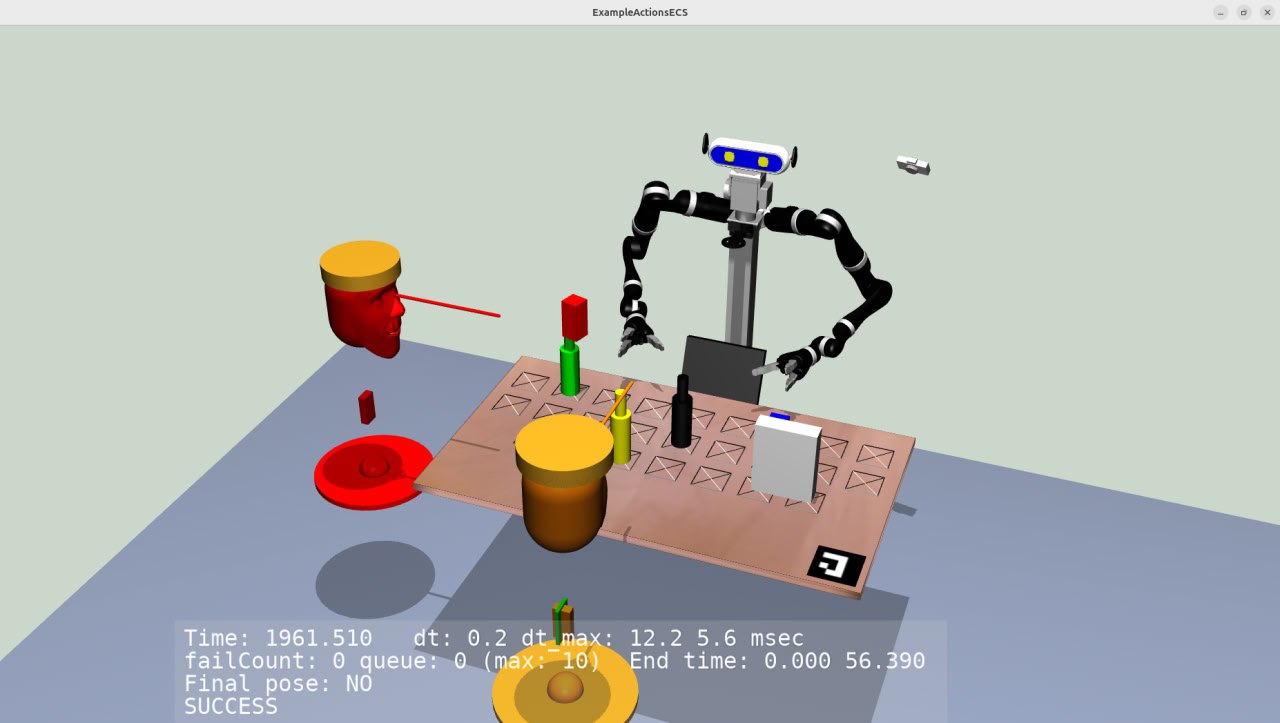
Robotics & AutomationAI & Machine LearningLAMI Paper Implementation
Individual Project
Here I implemented the Large Language Models for Multi-Modal Human-Robot Interaction paper. I changed the API calling part from OpenAI to DeepSeek v3 model and tested it successfully.
Project Details
 Robotics & Automation
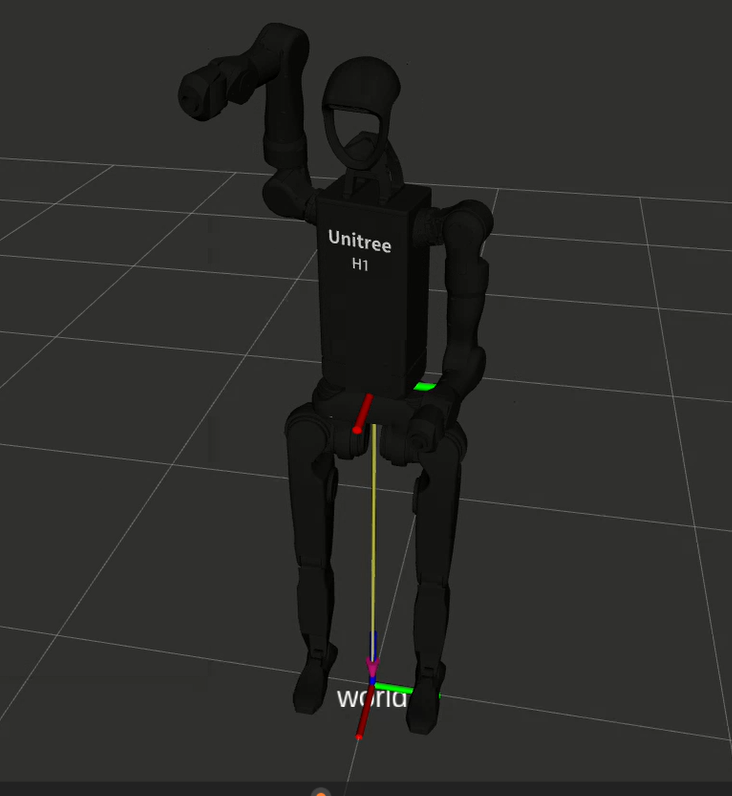
Robotics & AutomationUnitree H1 Robot WBPC Control
Individual Project
Here I implemented a Whole-Body Posture Controller (WBPC-lite). I solved inverse kinematics (IK) and understood task-space control & whole-body coordination. For this, I used KDL (Kinematics and Dynamics Library) through Python.
Project Details
 Robotics & AutomationAI & Machine LearningAdditive Manufacturing
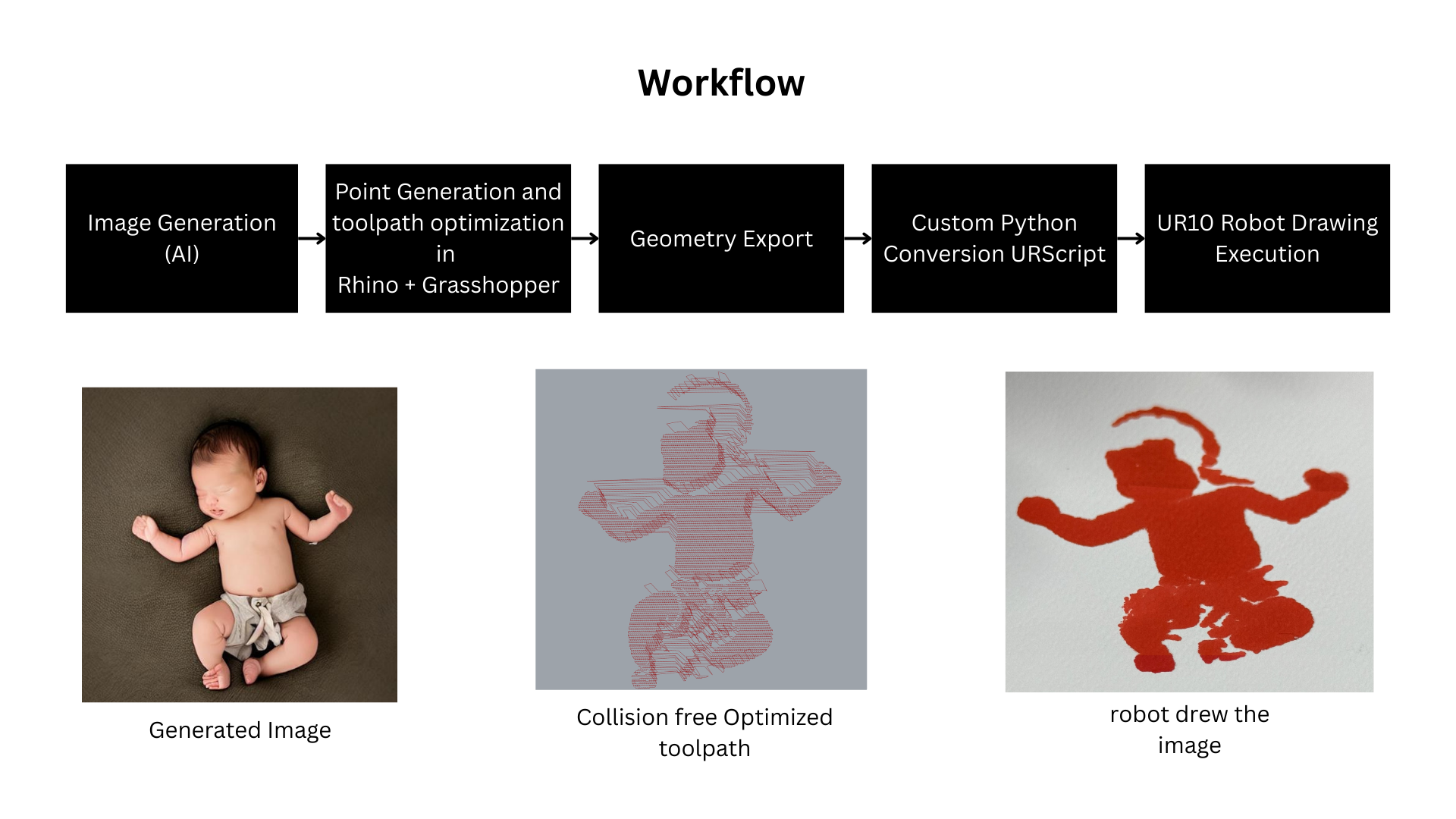
Robotics & AutomationAI & Machine LearningAdditive ManufacturingUR10 Robotic Portrait Drawing
Individual Project
This project demonstrates an end-to-end workflow for transforming an AI-generated portrait into a physical drawing created by a UR10 robotic arm. The pipeline combines Rhino, Grasshopper, Image Sampler, and a custom Python → URScript converter, enabling the robot to sketch halftone-style artwork based on brightness-mapped points.
Project Details
 Robotics & AutomationEmbedded Systems & IoTElectronics & Hardware Design
Robotics & AutomationEmbedded Systems & IoTElectronics & Hardware DesignCustom 5" Freestyle FPV Build
Individual Project
I built this quad because I'm deeply interested in FPV and wanted a hobby freestyle rig that helps me unwind while delivering durable performance and clean HD video. In its current setup, it flies for about 5–6 minutes in freestyle, hovers at roughly 17% throttle, and weighs around 680 g (AUW with a 6S 1500 mAh pack).
Project Details
 Robotics & AutomationEmbedded Systems & IoTElectronics & Hardware Design
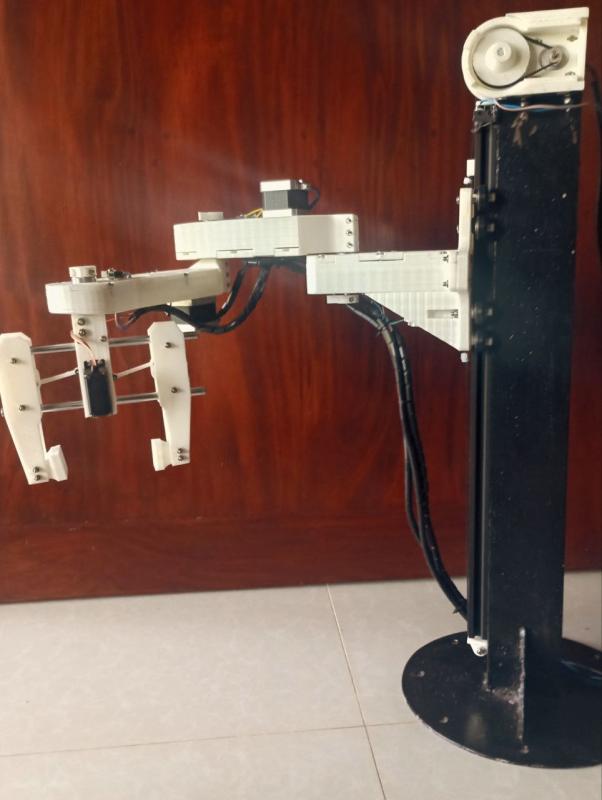
Robotics & AutomationEmbedded Systems & IoTElectronics & Hardware DesignSCARA Robot: Design and Control Implementation
Individual Project
This project focuses on designing and building a SCARA (Selective Compliance Assembly Robot Arm) for automated tasks like pick-and-place operations. The robot was carefully developed to ensure accuracy, efficiency, and reliability, making it suitable for various real-world applications.
Project Details
 Robotics & AutomationEmbedded Systems & IoTElectronics & Hardware Design
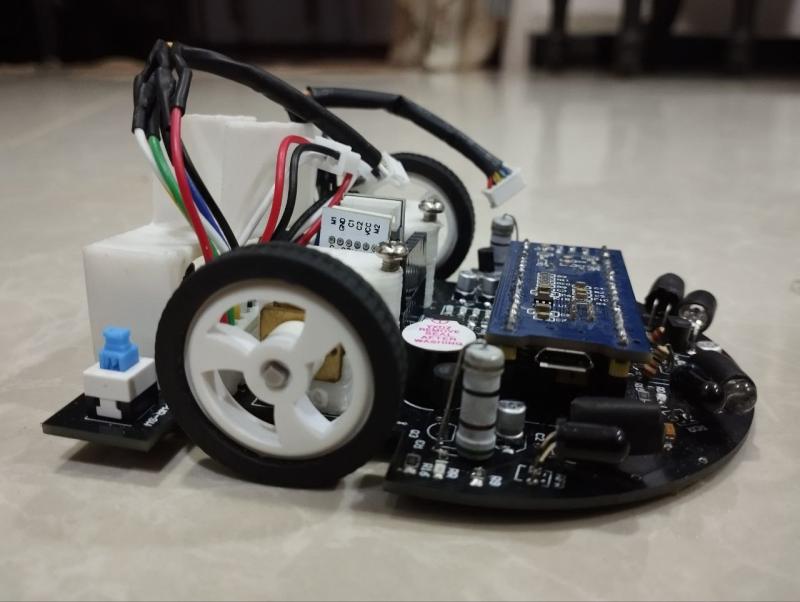
Robotics & AutomationEmbedded Systems & IoTElectronics & Hardware DesignMico Micromouse Robot
Individual Project
The goal of this project was to build a fully functional micromouse named Mico from scratch. This involved careful consideration of hardware, custom PCB design, and firmware development. Throughout the process, I selected and evaluated various components to ensure optimal performance and compatibility.
Project Details
 Electronics & Hardware Design
Electronics & Hardware DesignMade My First Double-Layer PCB
Individual Project
I'm happy to announce that I've successfully designed and made my first double-layer PCB for a high-frequency amplifier project, version 2.1. This project has been a great learning experience, and I want to share the steps I took to make it happen.
Project Details
 Robotics & Automation
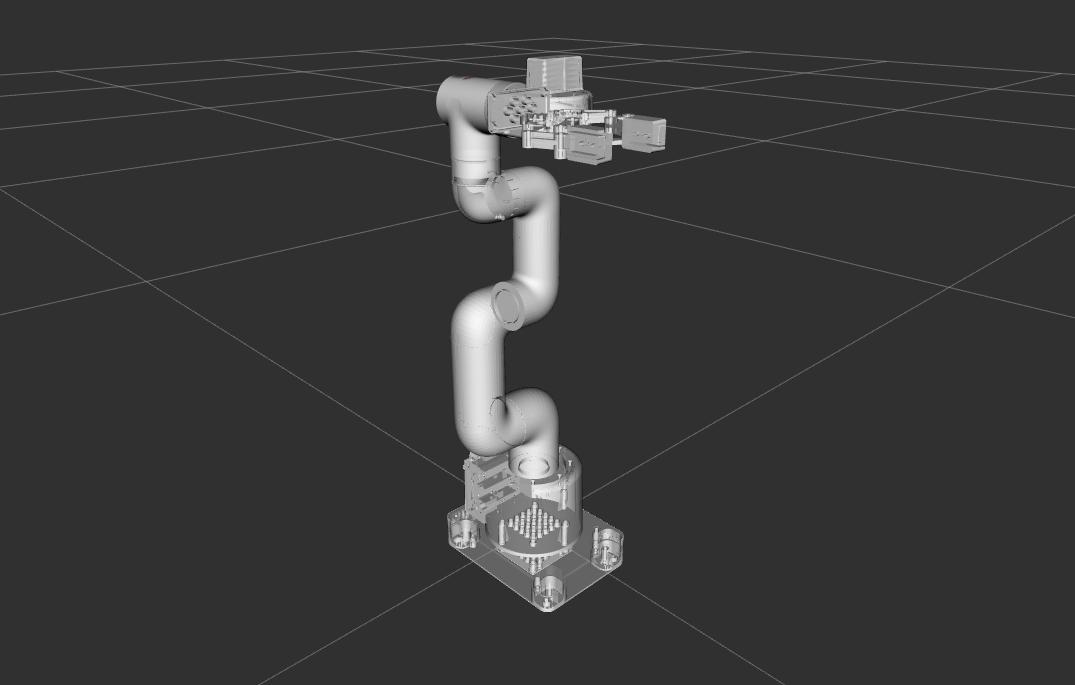
Robotics & AutomationModeling and Simulation of Robotic Arm in ROS 2 and Gazebo
Individual Project
In this project, I undertook the complete process of modeling and simulating the MyCobot 280 robotic arm using the Robot Operating System 2 (ROS 2) framework and Gazebo simulation environment.
Project Details
 IC & VLSI Design
IC & VLSI Design8bit SAR ADC IEEE Unic-CASS 2024
Group Project
Introduction: We propose to design a 100 KSPS 8-bit successive approximation register (SAR) ADC for low-power applications such as battery-powered or RF-powered internet-of-things (IoT) devices and wearable/implantable medical devices. Our main goal is to achieve 8-bit resolution while minimizing power and die area consumption. Walden figure-of-merit (FoM) will be utilized to quantify the performance of the ADC. The choice of the SAR ADC for the UNIC-CASS program will enable us to master both analog and digital design techniques while providing practical experience with relevant tools. Additionally, designing the SAR ADC layout will teach us crucial layout methods, such as common centroid and noise reduction techniques.
Project Details
 IC & VLSI Design
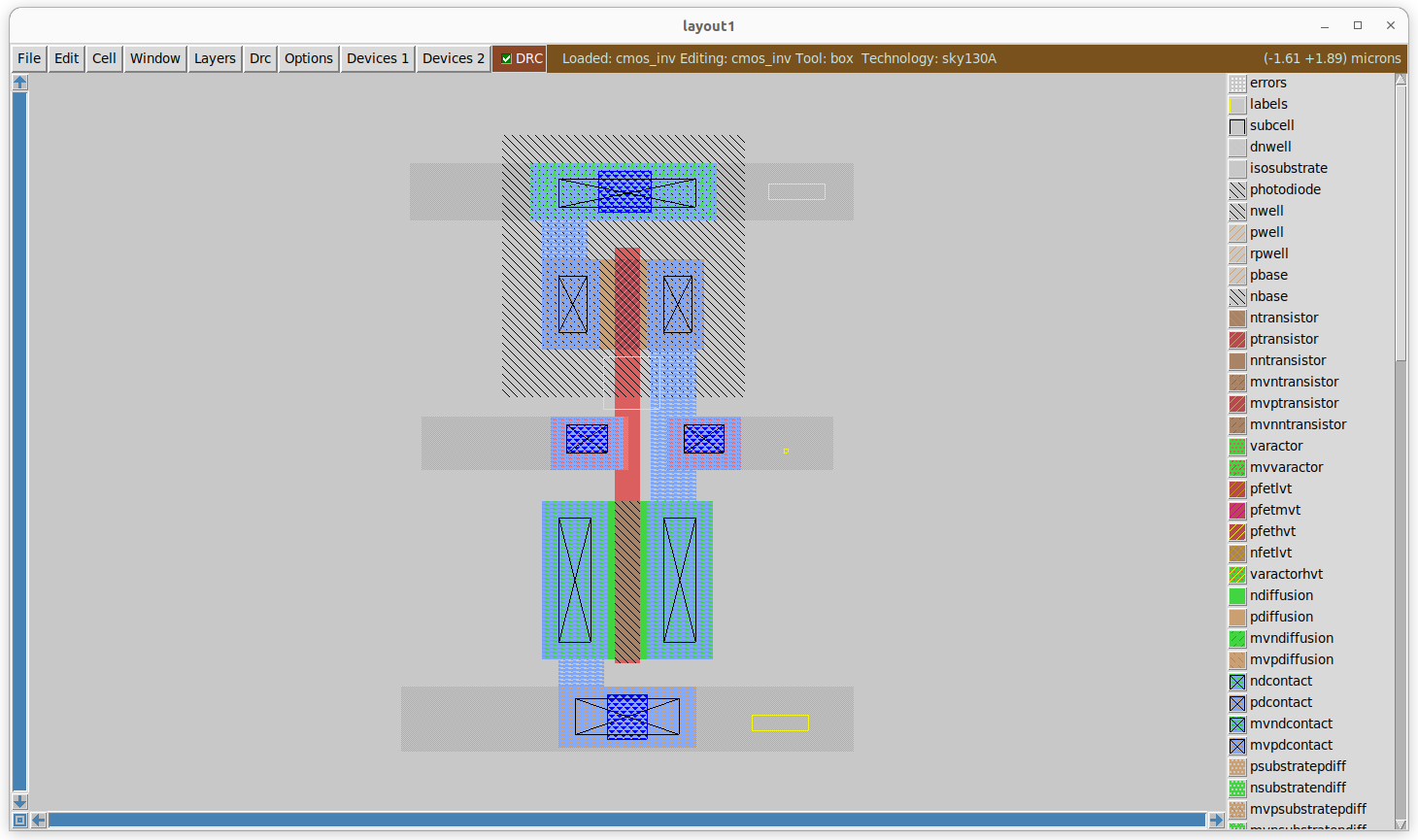
IC & VLSI DesignCMos Inverter sky130
Individual Project
This is an open-source project on CMOS Inverter Design, Analysis and Layout in SKY130 PDK.
Project Details
 Embedded Systems & IoTElectronics & Hardware Design
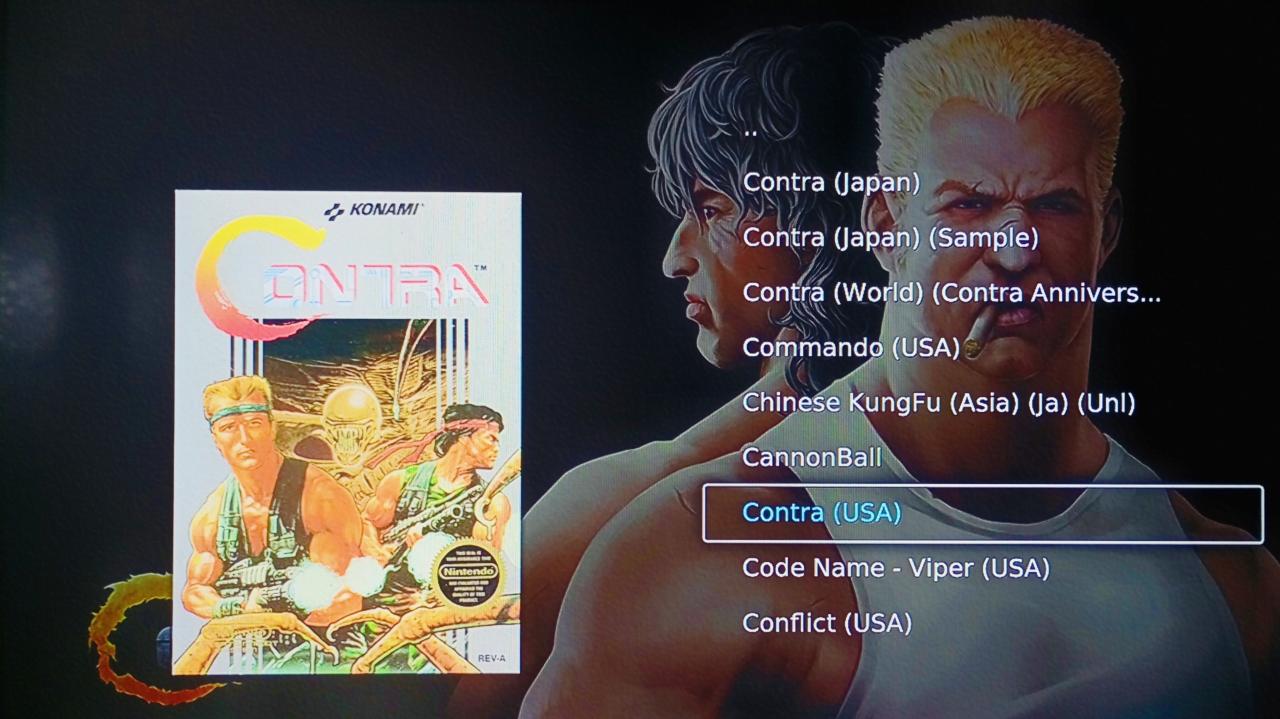
Embedded Systems & IoTElectronics & Hardware DesignRaspberry PI Media Center
Individual Project
This is my hobby project to transform an old TV into a smart TV with a Raspberry Pi! The project sets up a comprehensive media center using LibreELEC, providing access to PVR TV, gaming, local media playback, YouTube, weather updates, and more. It's a customizable and cost-effective solution for an enhanced media experience
Project Details
 Telecommunication & Networking
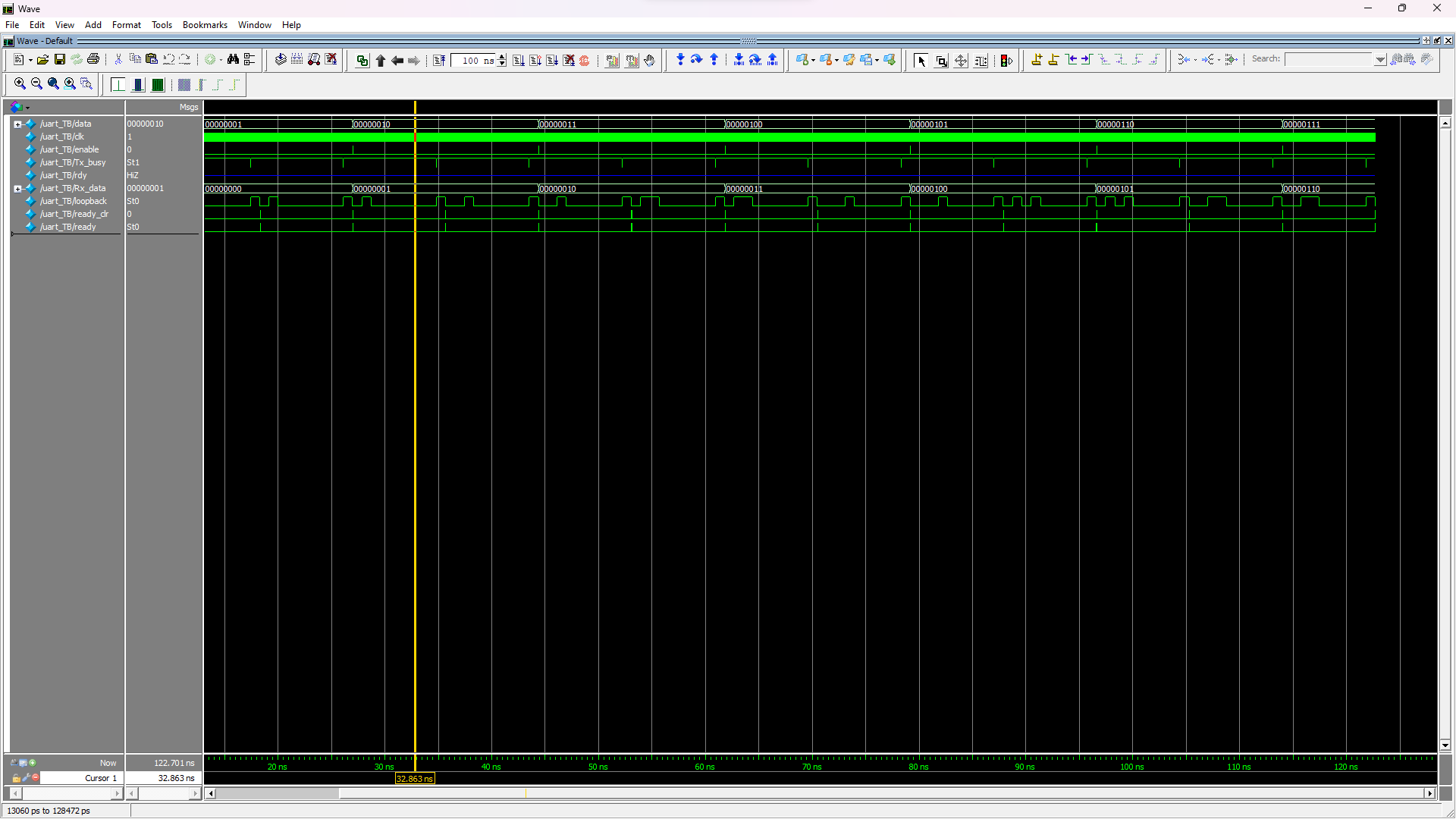
Telecommunication & NetworkingUART implementation on FPGA
Group Project
UART is widely used in embedded systems, microcontrollers, communication interfaces, and peripherals, facilitating data exchange between diverse electronic devices from simple sensors to complex industrial machinery. In this project, we implemented UART communication on an FPGA board, showcasing its versatility and efficiency in hardware applications.
Project Details
 Additive ManufacturingElectronics & Hardware Design
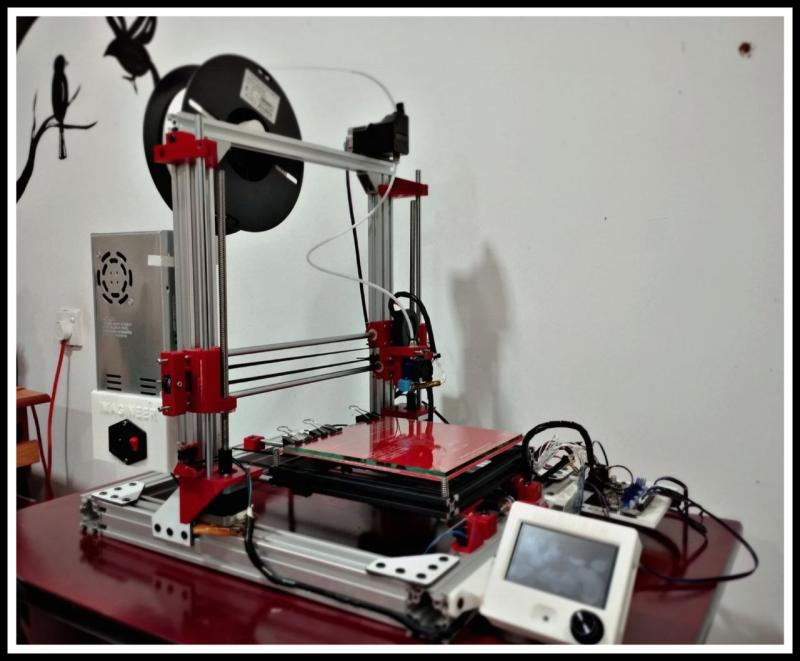
Additive ManufacturingElectronics & Hardware DesignImagineer 3D Printer
Individual Project
As a passionate ENTC student, I love bringing innovative ideas to life. One year ago, while working on Refreshmate, I wanted to build my own 3D printer. I embarked on a personal journey to create one, and today, I'm proud to say that I've successfully made the Imagineer 3D Printer.
Project Details
 Electronics & Hardware Design
Electronics & Hardware DesignAnalog High Frequency Amplifier
Group Project
An amplifier is an electronic device that can increase the power of a signal (a time-varying voltage or current). Depending on its frequency of operation, we have several types of amplifiers. As the name suggests, high-frequency amplifiers are designed to operate at high frequencies. These have a vast variety of applications like telecommunication, high-speed electronic measurements, laser research, and photonic research.
Project Details
 Telecommunication & Networking
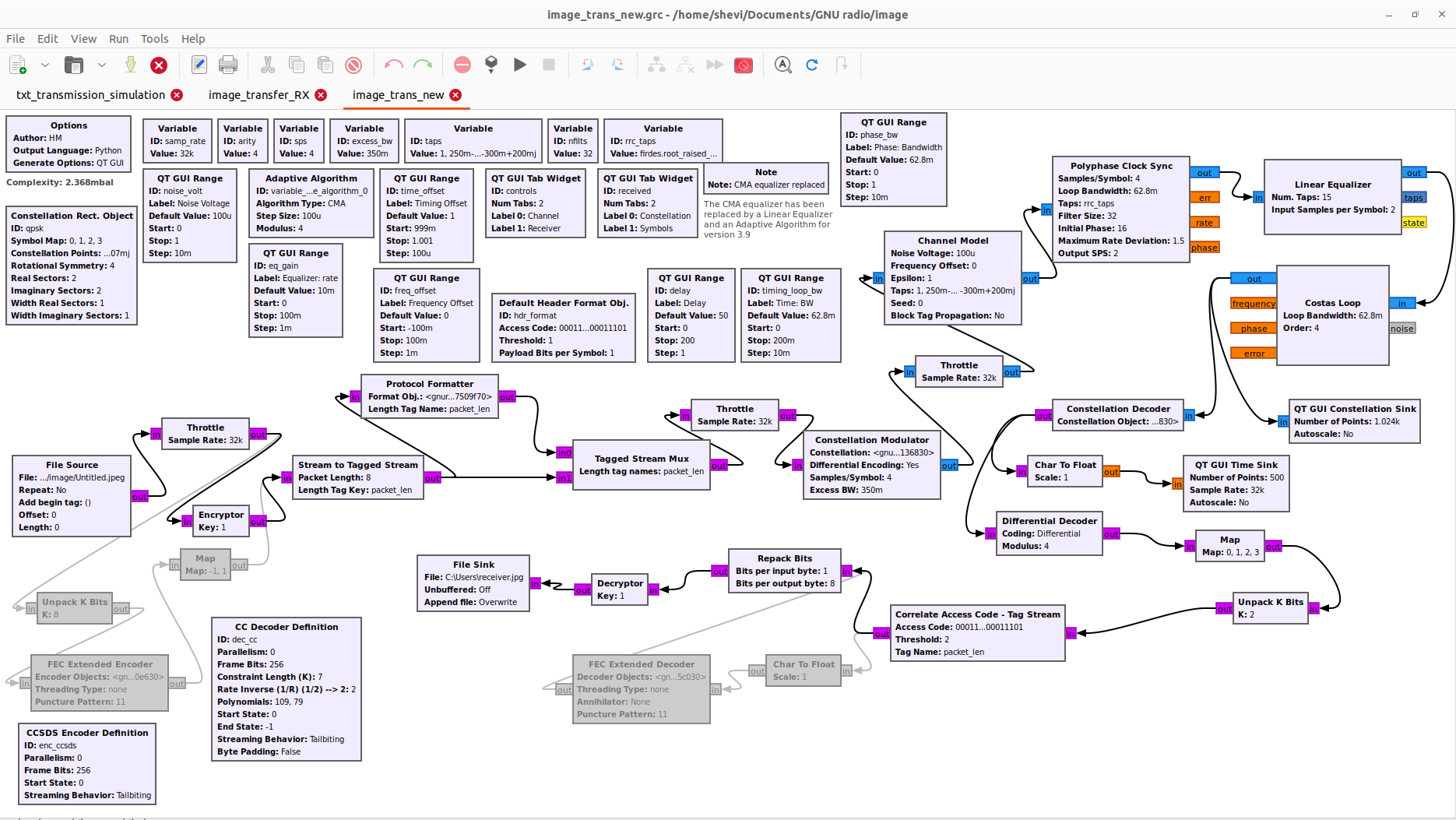
Telecommunication & NetworkingFileflow - Communication Design Project
Group Project
Successfully completed the 3rd-Semester Communication Design Project in IN21-S3-EN2130 - "Fileflow": A File Sharing System Using SDRs
Project Details
 Embedded Systems & IoTElectronics & Hardware Design
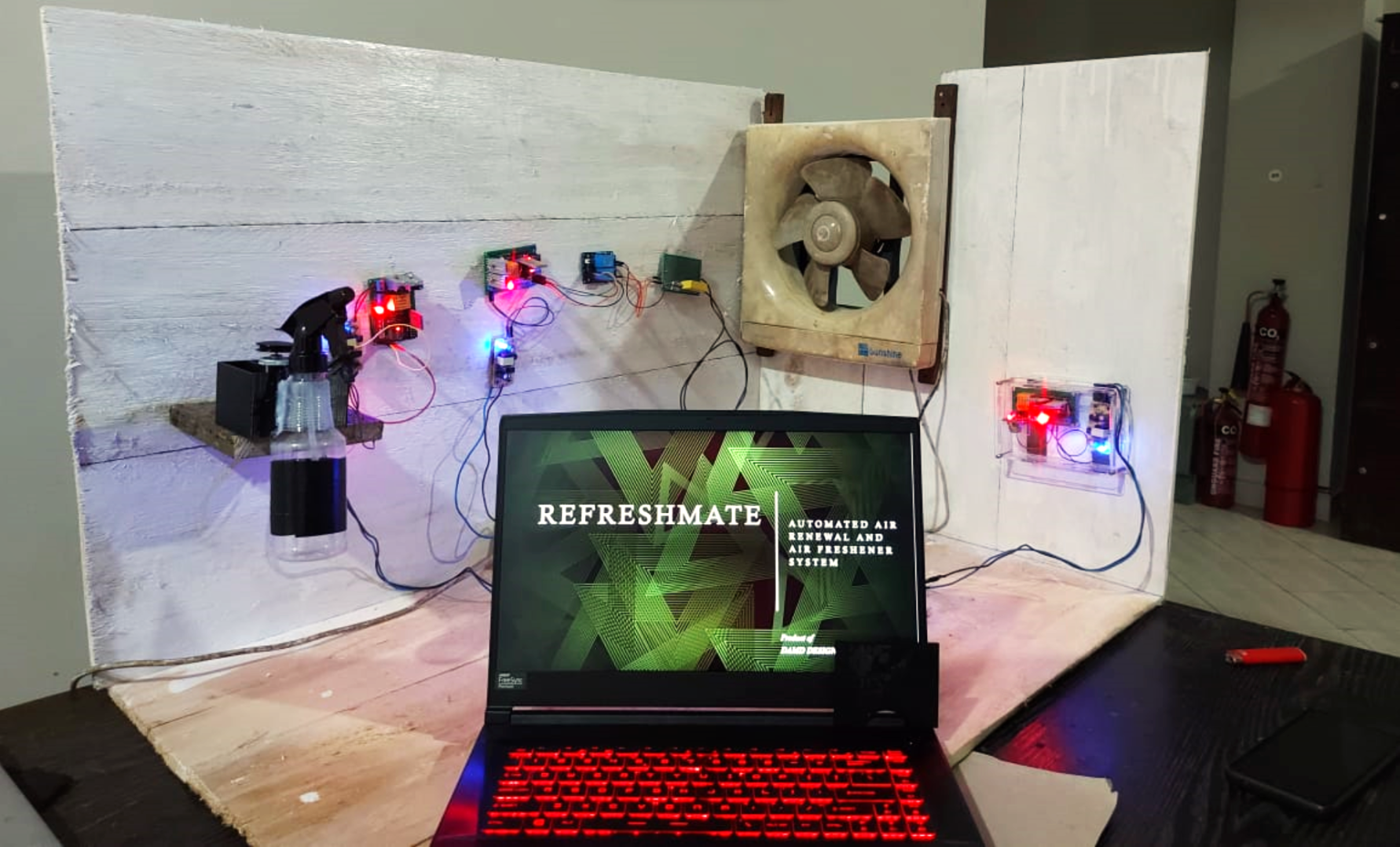
Embedded Systems & IoTElectronics & Hardware DesignRefreshmate
Group Project
Refreshmate: Innovative project for automated air renewal and freshener in public toilets. Core components: Gas sensor, exhaust fan, and air freshener, powered by both electricity and batteries. Primary goal: Autonomously detect and eliminate unpleasant odors, improving air quality.
Project Details
 Robotics & AutomationEmbedded Systems & IoTElectronics & Hardware Design
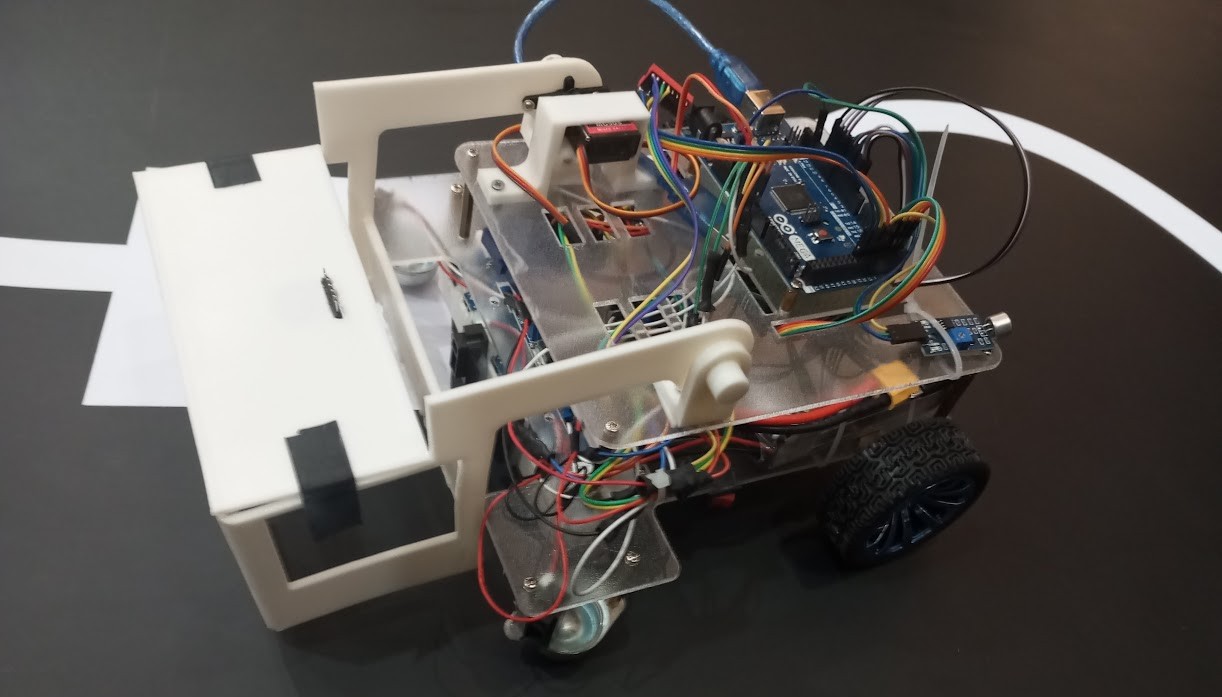
Robotics & AutomationEmbedded Systems & IoTElectronics & Hardware DesignArduino Line Follower
Group Project
This is the project that I did for the Semester 3 Robot Design and Competition module. An Arduino-based line follower robot that autonomously detects and follows a line path using sensors.
Project Details
 Electronics & Hardware DesignEmbedded Systems & IoT
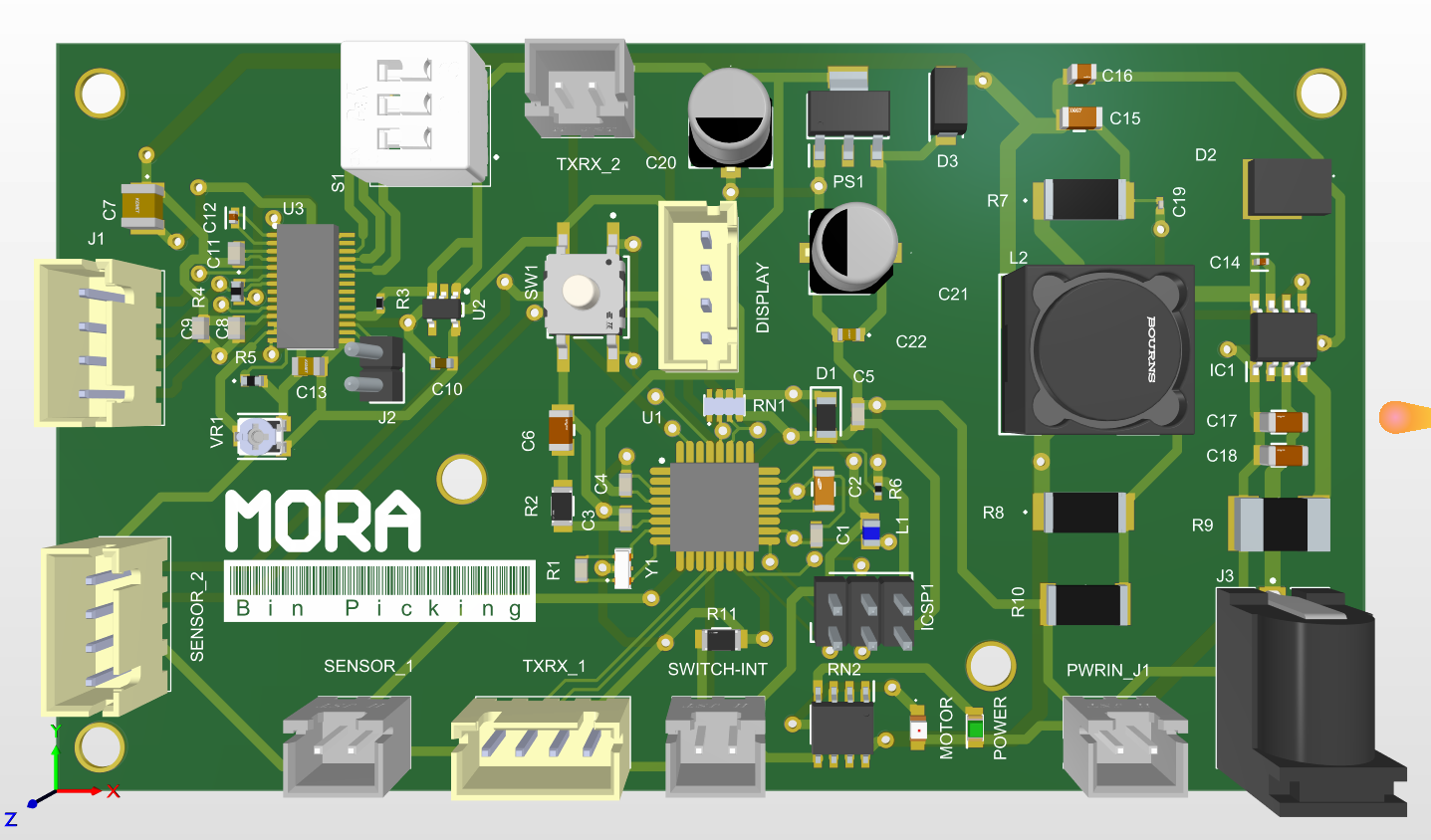
Electronics & Hardware DesignEmbedded Systems & IoTBin Picking Robot Gripper PCB
Group Project
This repository contains the PCB design files for the bin picking robot project, developed using Altium Designer. The project has gone through two versions, with the second version incorporating improvements and changes based on component availability and expert guidance.
Project Details
 Robotics & AutomationEmbedded Systems & IoTElectronics & Hardware Design
Robotics & AutomationEmbedded Systems & IoTElectronics & Hardware DesignGolem - SLRC 2024
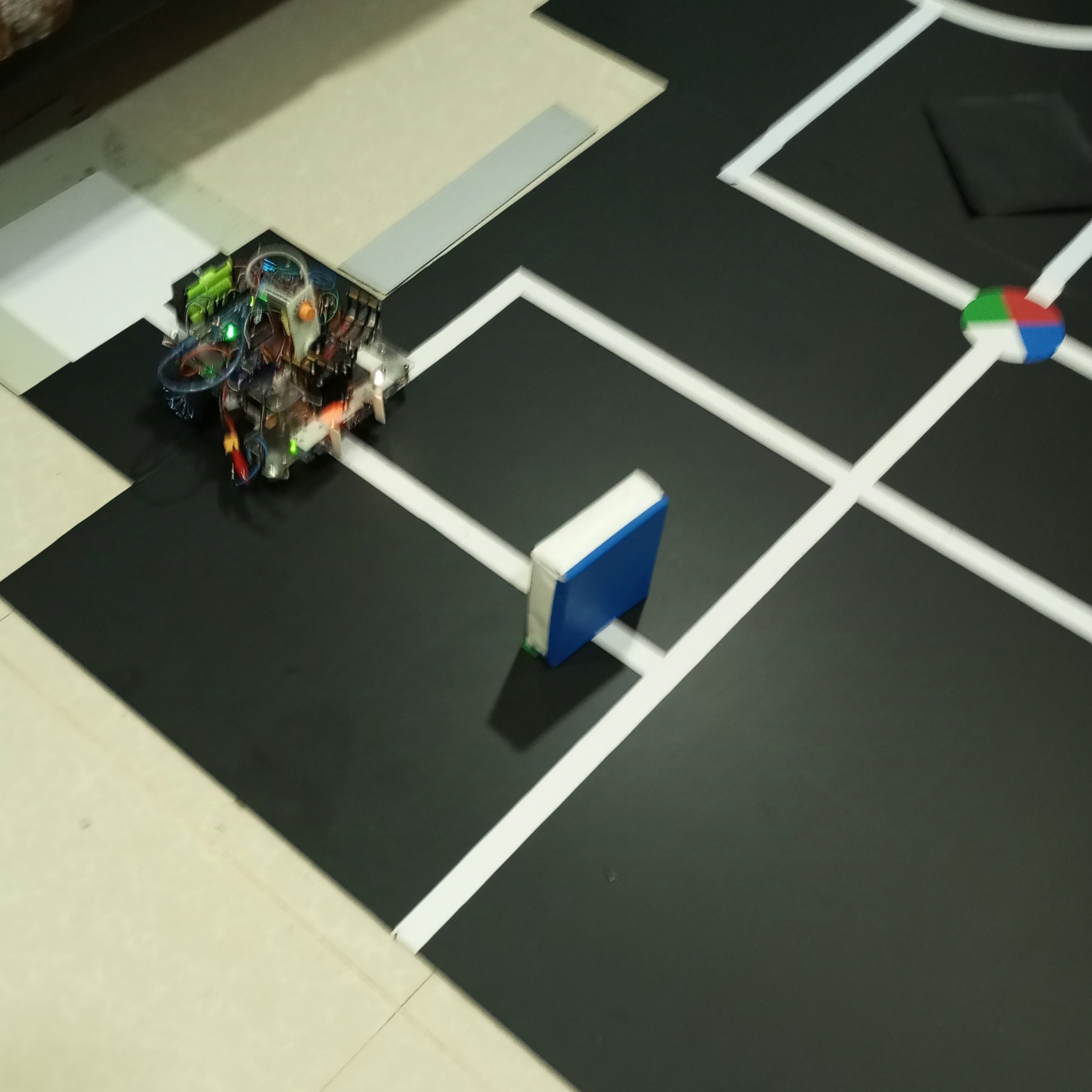
Individual Project
Golem is a line-following robot designed to navigate complex paths and perform various tasks autonomously. The robot was built using an Arduino Mega board, various sensors, motor drivers, and custom-designed components. A notable feature of Golem is its robotic arm, which I designed and 3D printed using my Imagineer 3D printer. This document provides a detailed overview of the project's development, including the design, implementation, and functionality of Golem.
Project Details
 Embedded Systems & IoT
Embedded Systems & IoTBin Picking Robot Gripper Source Code
Group Project
This repository contains the source code for a bin-picking robot project, developed using Microchip Studio. The robot uses an ATmega328P microcontroller, an OLED display, a stepper motor for a gripper mechanism, and a UART interface for receiving coordinates. The project also utilizes the u8g2 library for driving the OLED display.
Project Details